*Este artículo no está habilitado para la venta online, puesto que es necesario que sea medido y adaptado por uno de nuestros técnicos ortoprotésicos. Sólo disponible en nuestros centros ortopédicos.
El guante robótico para rehabilitación de manos SY-HRC12 cuenta con músculos biónicos neumáticos flexibles que ayudan a los usuarios a moverse y reaprender el movimiento, con el fin de mejorar la movilidad de la mano y acelerar el proceso de rehabilitación desde los tres niveles de nervios, cerebro y músculos.
Su uso es recomendado en pacientes con disfunción de la mano causada por:
- Accidente cerebrovascular
- Lesión cerebral
- Parálisis cerebral
- Traumatismo de la mano
- Cirugía ortopédica
- Linfedema después de tratamiento de cáncer de mama
CARACTERÍSTICAS
- Tecnología de exoesqueleto robótico blando.
- Accionamiento de 3 bombas: aprieta y extiende la mano completamente.
- Modo de extensión único diseñado para pacientes con contractura muscular y tono muscular de grado 2.
- Con transmisión de datos inalámbrica, mucho más cómodo.
- Múltiples tallas de guante para adaptarse a los distintos tamaños de mano de cada paciente.
- Batería integrada: diseño recargable y enchufable, para entrenar en cualquier momento y lugar.
- Más potente: hasta 9 niveles de intensidadajustables según la situación del paciente.
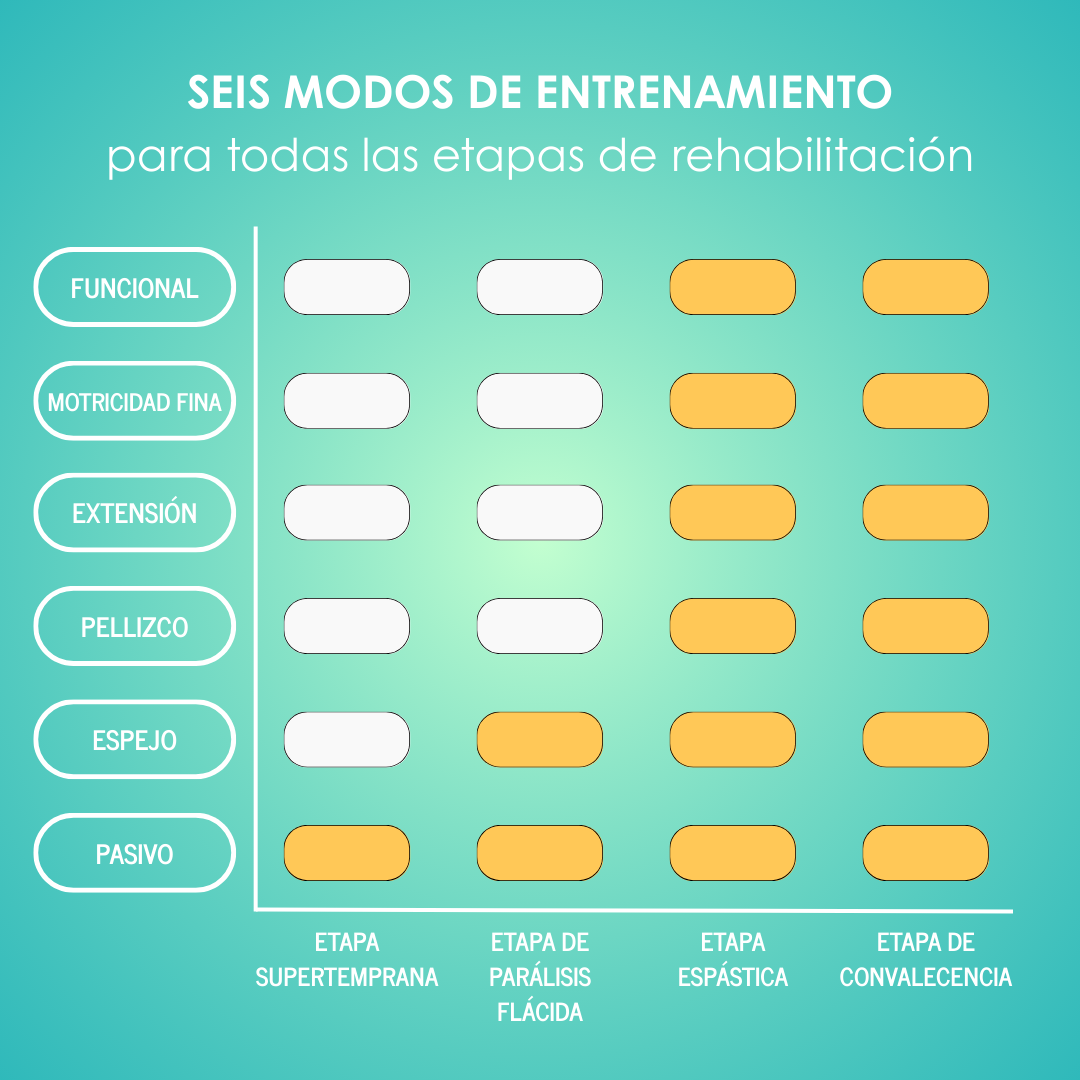
- 6 tipos de entrenamiento, para cubrir todas las etapas de la rehabilitación:
● Entrenamiento pasivo: El guante de fuerza impulsa la mano afectada para ejecutar flexión y extensión.
● Entrenamiento de pellizco: El pulgar se opone sucesivamente a los dedos índice, corazón, anular y meñique.
● Entrenamiento bilateral en espejo: La mano sana dirige los dedos del lado afectado para realizar acciones sincronizadas.
● Entrenamiento de extensión: Estiramiento estático de la mano para disminuir el tono muscular y aumentar el rango de movimiento.
● Entrenamiento de la motricidad fina: El guante eléctrico conduce cada dedo afectado para realizar la extensión y flexión.
● Entrenamiento funcional: Entrenamiento de pellizco de dos o más dedos para simular el pellizco de objetos cotidianos.